IoT Based Smart Physiotherapy System: A Review
 , Kainat Zafar1, Muhammad Amjad Raza1, Zahid Kareem1, Mui-zzud-din1, Hafeez Ur Rehman Siddiqui*1 and Sandra Dudley2
, Kainat Zafar1, Muhammad Amjad Raza1, Zahid Kareem1, Mui-zzud-din1, Hafeez Ur Rehman Siddiqui*1 and Sandra Dudley2(This article belongs to the Section Artificial Intelligence – Computer Science (AIC))
Export Citations
Cite
Saleem, A. A. , Zafar, K. , Raza, M. A. , Kareem, Z. , Mui-zzud-din, , Siddiqui, H. U. R. and Dudley, S. (2022). IoT Based Smart Physiotherapy System: A Review. Journal of Engineering Research and Sciences, 1(10), 45–55. https://doi.org/10.55708/js0110007
Adil Ali Saleem, Kainat Zafar, Muhammad Amjad Raza, Zahid Kareem, Mui-zzud-din, Hafeez Ur Rehman Siddiqui and Sandra Dudley. "IoT Based Smart Physiotherapy System: A Review." Journal of Engineering Research and Sciences 1, no. 10 (October 2022): 45–55. https://doi.org/10.55708/js0110007
A.A. Saleem, K. Zafar, M.A. Raza, Z. Kareem, Mui-zzud-din, H.U.R. Siddiqui and S. Dudley, "IoT Based Smart Physiotherapy System: A Review," Journal of Engineering Research and Sciences, vol. 1, no. 10, pp. 45–55, Oct. 2022, doi: 10.55708/js0110007.
During recent years, the increase in the ageing population, the ubiquity of chronic diseases in the world, and the development in technologies have resulted in high demand for efficient healthcare systems. Physical anomalies mostly caused by injury, disease, and ageing lead to limit the regular ability of people to move and function. Primary health care providers often refer patients to conservative regular exercises as the first stage of the remedial process. The exercises operated under trained supervision are effective, but it is not feasible to supervise each patient under the growing number of such cases. Smart Physiotherapy exercise is one of the most beneficial and need of the time. The proper and systematic execution of recommended exercises is required for effective home-based physiotherapy. This study aims at exploring recent investigations performed by researchers in this discipline and subsequently, provide a ground for new researchers to improve or bring innovation in the approach. Electronic databases were searched between 2015 and 2020 in addition the reference lists of the articles that meet the criteria were also searched. The outcome of this study indicates that there is no prolific application that automatically monitors and guides the patients in performing the right and systematic exercises advised by the physiotherapist.
1. Introduction
The effectuation of an Internet of things (IoT) healthcare system is a potential challenge for acquiring coverage for a more significant proportion of people in various locations at reduced prices [1]. In recent years there has been an increased ageing population, and the pervasiveness of chronic diseases in the world has resulted in high demand for efficient healthcare systems [2]. IoT is a smart approach to make systems sensible, remotely manageable, and reliable in many ways. IoT is comprehended by many organizations and is one of the most significant areas of future innovation. IoT is a system of physical objects, gadgets, cars, infrastructures, and other things integrated into a network of hardware, software, and sensors that can gather and interchange data [3].
With the increased development in communication technology, electronics miniaturization with low cost and high processing power made the IoT possible to bring the science fiction world into reality. IoT will arrive at 50 billion units by 2020 [4]. IoT is gaining wide acceptance and rapid penetration in various domains of work [5]. This ranges from agriculture to smart grid, smart homes to smart parking. The health sector is a catching domain of IoT, proving remote health monitoring [3]. One of the key roles of IoT in the health sector is to develop applications for remote monitoring [1]. Remotely health monitoring, a key integral feature of IoT in the health sector, could be efficiently used in assisting physiotherapy-related activities to be performed precisely and effectively [1].
Researchers have investigated and envisaged IoT as a virtual physiotherapist that has the potential for the systematic execution of prescribed exercises that eventually leads to a speedy recovery and prevents from permanent joints disorders [1], [6], [7].
Physical exercise is the only way to enjoy a healthy and physically active life. Many of the physical and subsequent issues that individuals encounter may be solved without the need for drugs with the help of physiotherapy. Physiotherapy can help patients regain and maintain mobility and functioning. It does that with several approaches such as massage, exercise, counseling, and the provision of mobility and functioning aids. Healthcare professionals frequently recommend regular exercise to patients suffering from fatigue caused by accident, sickness, or ageing that restricts their normal ability to walk and perform regular tasks, these orthodox doctrines to addressing physical problems of patients are deemed not fully efficacious.
The proper and systematic execution of recommended exercise is required for effective home-based physiotherapy [2]. Physiotherapy is often not only used to repair functionality, but also to avoid motor problems [2]. To recuperate the specified treatment plan, the exercise must be performed regularly and correctly [2].
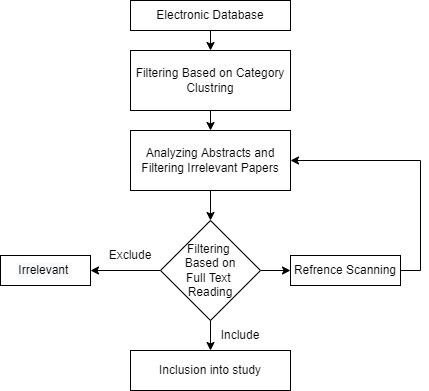
This study is aimed at analyzing different research about physiotherapy assistant smartphone applications that help out patients during the execution of prescribed exercises and explore which research/methodology is more useful for patients and capable to assist in the execution of correct physiotherapy activities as well as psychological support to the patient remotely.. Different electronic databases were used to search different IoT-based physiotherapy assistant articles. IoT-based physiotherapy system coupled with machine learning”, “Smart IoT-based physiotherapy assistant” and “Remote IoT-based physiotherapy system with machine learning” were the terms used to search related articles. There were numerous physiotherapy assistant systems, but in our case, only solutions based on IoT and IoT coupled with machine learning were considered. The rest document is structured as A literature review on the work of investigators is described in section 2. Section 3 and section 4 comprise of Discussion Analysis and conclusion respectively. Flow diagram of the study is presented in Figure 1.
2. Literature Review
In a conventional physiotherapy approach, there is no proper system to monitor and assist the physical exercise of the patient outside the clinic. The evaluation of the physical exercise of the patient is done at the clinic [7]. Thus, it entirely relies on the availability of physiotherapists. The evaluation of prescribed exercise requires more effort, more care, more expenses, and more time from the physiotherapist [8]. This approach leads to a waste of resources, money, and time which creates a lack of interest in patients about the execution of the exercise. Furthermore, the physiotherapist is bound to monitor patient exercise on site. The traditional system also suffers from a lack of communication that sometimes leads to the absence of response or feedback to the patient regarding their exercise. Several variations from the ideal movement may arise in these cases: unconscious introduction of offset motions or postures, inadequate movement range, incorrect muscle activation time, or even biomechanical imbalance.
Home-based physiotherapy exercise helps patients to stimulate muscle activity by allowing them to perform the recommended workout at home [2]. The patient has to train and impart proper education for the benefit of physiotherapy and allow him/her continuous faithfulness to the program [9]. Exercise should be performed correctly and effectively, but patients are often unsure about the right approach without recalling the whole program as advised by the clinic [10]. Such challenges can be overcome by a smart physiotherapy system that has remained a target research area for researchers. Several researchers have proposed smart physiotherapy systems using IoT.
The accuracy of the Microsoft Kinect skeleton joint tracking system is evaluated by using the Vicon Bonita system is presented in [6]. The Microsoft Kinect system uses the camera and two IDS at a specific distance to check the angle of movement of specific joints and three-dimensional coordinates of different body parts. The Vicon Bonita system is an array of eight infrared cameras positioned around the test subject. Infrared light is emitted by 68 LEDs positioned around the lens, that emitted light is reflected by markers affixed to the body of the subject. Vicon Nexus software was used to collect data from cameras and calculate marker placements. The IR light reflection from tags placed on selected body parts was recorded to form a spatial triangular shape that helps to build 3D shape. Vicon Bonita system was used for data collection and analysis. An angle comparison computed with both Vicon and Kinect system is performed and found that the minimum deviation is 2.7° and the maximum deviation is 14.2° at the hip with an angle of 135°. The evaluation shows that the Microsoft Kinect system provides accurate joint position during exercise.
In [11], the author provide the Kinect-based physiotherapy system to execute the prescribed exercises at home. It uses two Infrared Depth Sensors (IDS), one RGB camera, Microsoft Kinect System, and a tablet. To cover all joints, two IDS are used. It uses the Microsoft Kinect skeleton joints tracking system to check the accuracy of exercise, patient’s movements were tracked by an infrared camera, to reflect pictorial form on the tablet screen RGB camera was used and an acceleration sensor was to check the body motion. Microsoft Kinect library is used to collect data from all the sensors, camera, and stored into the database for future analysis by the physiotherapist. The Kinect software provides information to the user about the exercise to be executed and keeps track of the exercise execution frequency or number of steps patient performed.
In [12], a system based on smart connected devices, such as a smart walker, and a force platform that employs a variety of sensing technologies, including piezoresistive force sensors and microwave radars was presented. In smart walkers, the Fexiforce sensor and the FMCW 24GHz microwave radar are employed. The Fexiforce sensor monitors pressure and user balance when using the walker. Gait was measured using an FMCW 24GHz microwave radar array. The gathered data is transmitted through Bluetooth. To produce a force platform, load cells are put beneath an acrylic plate. During a complex game, the system evaluates the ground response force caused by a subject’s applied force. The data from both devices is kept on a shared client-server architecture. Two people were chosen for the experiments, and two mint walks for gait training over a distance of 20m were done. The development of the obtained signals associated with lower limb mobility was supplied by microwave radar. Subjects used Therasoup to capture things on the force platform. Participants utilized both their left and right hands. The force values from the platform can be utilized to track the evolution of patient stability over the course of several training sessions.
The proposed method by [13] enables paralyzed persons to move freely and safely while lowering the cost of therapist services. To control the wheelchair’s movement, a voice recognition system was combined with an Arduino interfaced joystick to create a smart wheelchair. Furthermore, the device may detect impediments automatically by employing an ultrasonic sensor. Power wheelchairs include both control systems and therapy alternatives for disabled people that have only lower limb, upper limb, or mixed lower limb and upper limb impairments. A mobile application to control the movement of a wheelchair, with speech recognition was developed to take commands from a microphone and match them with predefined voices. An ultrasonic sensor is used to identify obstructions. For therapy, an auto pulley system and vibration pads are used. The proposed device lacks the power to carry more than 93kg of weight, has only rudimentary therapies for the upper limb, only an auto pulley that can’t handle more than 10kg of weight, and only a vibration pad for the lower limb.
In [14], m-Therapy, a multimodal therapeutic framework that collects data using various environmental and gesture-tracking sensors was proposed. The gathered data is compressed and sent to a server using the m-Therapy framework. The framework employs a therapeutic paradigm to help a patient complete therapy activities at home. The proposed system can identify rotational and angular motions of thirty-five joints. The system can identify whether any of the preset high-level gestures are performed. Data from therapy sessions include text, video, gesture, motion, and audio data. After the completion of the therapy session, data is uploaded to the server. The server is responsible to utilize a big data analytics engine to drive structural data gathered from therapy session data using various gesture recognition techniques. This system was evaluated using usability testing and system testing, and the findings were good.
The work investigated by [15] proposed a system to monitor, guide, and remote treatment of the patient. The system comprises of the medical dynamometer, range of motion encoder, force sensor, torque sensor, encoder input board, SQL database, main Controller (Computer system), internet, DiagnoConn a doctor and patient Module, professional interface, and user interface. Four distinct exercises, including isometric, isotonic, passive, and resistive, were performed using a robot. The robot can flex, ulnar, radial, extend, and deviate for the wrist, supination, and pronation for the forearm. The robotic manipulators exercise according to the medical criteria. Three patient categories were treated in the DiagnoConn application: new patients, continuous therapy patients, and patients whose therapeutics have been completed, and all of the information are stored in an SQL database. The doctors are logged in to system with their username and password. Firstly, they assess a patient’s physical characteristics and then the doctor evaluates these data and allocates date/time, kind of workout, level of difficulty, motion range, and strength of the workout and stored it in an SQL table. The patient executes the exercise at the specified place and parameters for the next session were determined by a specialist based on the result of the previous session. A survey comprised of seven questions was conducted from 26 people. According to the survey results, the highest satisfaction rates for speed and availability at all times were 92% and 93%. The reliability criterion had the lowest satisfaction percentage, at 75%. The total satisfaction percentage for performance is 88 percent, which is sufficient for user satisfaction.
The physical telerehabilitation system (PTS) is proposed by [16] to support patients and physiotherapists over the internet. It uses camera, microphone, and motion sensors to collect data produced during exercise. Twenty-five therapists and twelve physiotherapists responsible for the rehabilitation of ninety elder patients collaborated to design PTS. This system provides the facility of audio, video, drawing, and messaging communication channels to the users. The evaluation of this system is performed by the interview of 15 elderly people more than 65 years old and 10 other stakeholders. The outcome of the interviews highlighted issues related to the need for reliable services, sucre access to the system, and data protection. Aside from that, all stakeholders recognize the tool’s tremendous potential.
In [17], the system which is used to evaluate the swimming method of different swimmers at the same position is proposed. This system integrates a single, wearable sensor device in a pair of identical, redundant IMU six-DoF sensors, and a 3-D accelerometer and gyroscope. The initial experiments employ two redundant 6-DoF IMU sensors due to the measurement reliability of the waterproof sensor device prototype. The motion signals from both sensors were of the same quality. A virtual link is established between the patient and the physiotherapist in order to give feedback about swimming to the concerned.
In [18], an IoT based Smart walker system is presented which is composed of IMU, Load cells, a Force Sensor, a Doppler Sensor, an RFID Reader, a Cloud System, an Atmega2560 microcontroller, a computer system, wireless, Bluetooth 4.0, an internet, software module and augmented with two interfaces Professional interface for physiotherapist and user Interface for patients. The RFID Reader recognizes the patient’s ID and initiates a physiotherapy smart walker session. The sensors sense data about elevation, weight, and movement and send it to the gateway (laptop) via Bluetooth. Subsequently, the data is sent to the cloud and made visible to the physiotherapist remotely. During a physiotherapy session, two ultrasonic sensors are utilized to extract the patient’s walker’s elevation on each side. This measurement is taken so that the physiotherapist may see if the patient is lifting the walker more on one side than the other, which indicates that one arm is weaker than the other. Data is transferred to the cloud using Wi-Fi. At the user end, a mobile app is used for two purposes. The first one is to provide an alternative path to get data from the sensor via Bluetooth and send it to the cloud when the internet is accessible. The second purpose is to access historical data and feedback from physiotherapists. At the physiotherapist’s end, a website, as well as the mobile app, is developed to access cloud data to monitor or get updates. A group of five healthy males of age group ranging from 24 to 30 years with an average weight between 65-80Kg participated in the experiment. The test was evaluated by dictating a participant to simulate as an abnormal right-side tilt walking and the other is asked to walk the natural way and normal way. The analysis of data showed a clear difference between them.
In [19], the author offers a home monitoring system to assist older people with self-rehabilitation. This system employs an ambient sensor, a Bio Signal Sensor, and three wearable IMUs on dominating ankle, on his/her chest, and dominating wrist, with the sensors’ y-axis. Through the Data Fusion layer, the data received from the sensors is converted into a single model. Each wearable sensor captures data in three dimensions, velocity, and acceleration, namely direction, at a sampling rate of 10 Hz. Through the system’s recording, specialists may also assess the patient’s development and leave opinions. The five specially developed rehabilitative exercises are as follows:
Knee’s flexion extension while sitting.
Lifting and lowering one’s arm.
Rotation of the trunk while seated.
Standard backward leg extension.
A light “squat”
Each patient’s personal “golden standard” that is validated by a medical expert is stored at the first-time workout is done in the clinic under the guidance of a competent trainer. Previously stored benchmarked patterns were used to aid patient performance and measure effectiveness of self-managed rehabilitation process.
A set of smart gloves for upper-limb rehabilitation that can be used to naturally interact with therapeutic serious games is presented by [20]. Patients with motor disabilities can utilize these games to do highly engaging workouts based on diverse VR settings. The system is comprised of a series of software tools that assist in data collecting and processing, as well as a set of highly interactive therapeutic games to be used in hand and finger rehabilitation session exercises. Throughout a rehabilitation session, the physiotherapist can use the information acquired to evaluate the patient’s performance during various physical tasks.
In [21], Smart Pants, a home rehabilitation method after the stroke that uses IMU, Pressure Sensor, Force Sensor, and wireless communication to send data to the mobile devices was presented. It uses IMU along with an accelerometer, magnetometer, and gyroscope. Pressure sensors are resistors that alter resistance according to the scale they are pushed. It comprises 4 IMU nodes, two of which are located on the thighs and shins each. Furthermore, the nodes attached to the shins are coupled to the two pressure sensors implanted within a footwear insole. Finally, the data from all the sensors were collected by mobile device that collected data is used to provide real-time audio or video feedback to the subject about the performance of the workout. Performance of the proposed system is assessed by five exercises (lower limbs Abduction, Extension, Sit-to-Stand, Gait and Bipedal Bridge). Several ML models were evaluated, that includes C4.5 Random Tree (RT) and J48, Random Forest (RF), LibSVM, Naive Bayes (NB) Sequential Minimal Optimization (SMO), Logistic Regression (LR) and Multilayer Perceptron. K-fold cross-validation with 10 folds is performed to validate the system. Results obtained from the dataset with less features were the same as the results obtained from complete dataset. A dataset with small data set was preferred due to faster calculation and immediate feedback. The experiment showed that the Random Forest outperformed and showed more Precision, Recall, and F-Measure results (99.3%) compared to the Multilayer Perceptron (97.9%) result.
In [2], a system that consists of an Electromyography sensor and inertial sensor unit (Accelerometer, Gyroscope, and Magnetometer Sensor) to monitor the human body motion and muscular activation was proposed. Two body area networks were deployed with an electromyography sensor and two inertial units on the subject’s body for maximum retrieval of the relevant information. Three women and four males aged about 27 years old took part in the study and completed three activities labeled with three classes: correctly, deviation 1, and deviation 2. Two sets of features were considered which were extracted by Body Area Network (BAN) and BAN + inertial unit. Four machine learning (ML) models that include K-Nearest-Neighbors (KNN), Random Forest (RF), Decision Tree (DT), and Support Vector Machine (SVM) were used for classification. DT and KNN outperformed other ML models with an accuracy between 95% to 100% on all three exercises.
ePhysio, a platform for physiotherapy with sensors and remote monitoring of a rehabilitation system for musculoskeletal exhaustion is proposed in [7]. The proposed system comprises of Inertial Measurement Unit (IMU), textile Sensor, accelerometer, gyroscope, magnetometer, cloud system, rehabilitation hub, computer system, Wireless communication technology (Bluetooth 4.0), and ePhysio module. Inertial sensors can be attached to the forearm, the sternum, and the scapula. The ePhysio stimulates and encourages patient activity. This system creates a virtual link between the therapist and the patient. The physiotherapeutic specialist may provide the patient with information on training protocol quality, therefore offering users an actual comment on the effectiveness of the workout. The sensors send data to the rehabilitation hub using wireless Bluetooth and store enriched data (sensor data with Metadata) at the cloud system by using the wired connection. The metadata contains information such as the patient’s identity, workout type, execution time, and so on. From the cloud, the physiotherapist can visualize patient data and adds comments about the patient exercise. The enriched data stored at cloud system can be then used for future analysis and to train machine learning models for continuous prediction and evaluation. Accelerometer, gyroscope, and magnetometer were utilized to integrate arm abduction and horizontal flexion angles with scapular movement to extract the hand position during traditional shoulder rehabilitation activities and assess the difference in arm trajectory between the real and expected arm. The patient’s context information can eventually be displayed, for example, as a report to specialists on a patient’s performance over time.
In [22], a series of games for physiotherapy using a Kinect natural user interface and a set of Unity3D VR games was presented. A smartphone application was developed to allow physiotherapists that connect to physical therapy serious games via a remote server to access patient electronic health records, game remote configuration, and data presentation. Using a Kinect sensor, the device records the patient’s motions. Thirty-three people were chosen to take part in virtual reality games. The Kinect sensor is utilized to calculate the hand’s ability to perform arm movements as well as the elbow and wrist angles. Some workout game sessions and angle values were kept in the database. The right hand outperforms the left hand in terms of amplitudes of reached angles throughout the intensive gaming session, according to the findings. There were no significant differences between male and female gaming sessions when the data for game sessions were compared. Using a smartphone app, therapists can visualize data and provide training plans.
Remote Monitoring of Stroke Patients Physical Rehabilitation Using IoT and Virtual Reality is presented by [23]. The goal is to create smart gloves and a headband for physical rehabilitation monitoring. Merging Virtual Reality (VR) serious games with a Wearable Sensor Network to boost patient involvement during physical therapy and analyze their progress. Gloves and headgear with flexion sensors to record angular flexion, Force Sensors (FlexiForce A201) to record the force of each finger, gyroscope for angular motion, accelerometer, and magnetometer for movements. For exercise, virtual reality-based 3D games are utilized. The Arduino nano communicates with the sensors and the mobile app through Bluetooth. In addition, data is transferred to a web server for remote access. Five sessions are performed by two participants in which they grab the virtual objects. Volunteers that grabbed a substantial number of objects has stronger muscles. The results reveal that men volunteers have stronger macular abilities than female volunteers since they grabbed a greater number of objects and have more scores.
In [24] a low-cost elbow exoskeleton linked to a Context-Aware architecture that enables the patient to practice rehabilitative tasks interactively through a virtual reality system was presented. The data from the exoskeleton sensor is transferred to the local context monitoring system, which is focused on patient monitoring and follow-up. The data is then sent to the cloud, where it may be accessed by medical remote monitoring, exercise monitoring, and e-health care services, as well as saved in historical data where an exercise and medical log is kept. The results of sensors can be used by physical therapists to modify the exercise. During the experiment, the number of average collisions identified is larger in the initial sessions than in the last. The results of the reference patient demonstrate that, although not have an elbow injury, the difficulty of the exercise causes him to make some errors while performing the exercises with both actual and simulated weight.
Virtual Reality-based homecare VirtualPT on a personal computer for the physiotherapist to assist elders in regaining full physical function is proposed by [25]. Important health metrics are continually monitored and tracked while performing home-based suggested physiotherapy activities by integrating immersive Virtual Reality with the wearable VirtualPT Sensor kit. The MAX30100 Pulse Oximeter sensor and temperature sensor are used to measure pulses and body temperature, respectively. Body deviations are computed using the k-nearest neighbor and decision tree techniques. A regression algorithm forecasts the patient’s future situation. The system determines whether or not the patient is physically fit to continue exercising. The Brainwave Starter Kit was used to examine the patient’s mental condition, and based on the results, exercises were prescribed. The Microsoft Kinect sensor is used to evaluate a patient’s skeletal movements in conjunction with the movement of the VR assistance, which involves calculating angle deviations of active joints. The Microsoft Kinect sensor is used to analyze the acceleration and rotation of bodily components. Using MPU9250 IMU sensors and the Dynamic Time Warping algorithm, determine the rate of the exercise. For each exercise, the CNN model is trained. The technology compares the patient’s workout acceleration data with the trained model to detect the movement. If the user’s medical condition changes, the system tells the user and makes the necessary adjustments, such as reducing the exercise count or speed. The system reschedules the exercise based on previous progress saved in the system. The data is displayed to the user via a virtual reality dashboard. The supervised assessment in the clinical setting, according to the physiotherapists and based on the responses, made participants feel safe in their surroundings. 90% of those who utilized VirtualPT at home were dependable.
3. Discussion and Analysis
The IoT based smart physiotherapy system presented in [2] doesn’t provide real time monitoring to be supervised by physiotherapist remotely and thus it lacks a real time communication/feedback between patient and physiotherapist. The subjects participated were also not covering a wide age group. Furthermore, the participant numbers were too low to deduce performance on the base of generalization i.e., 4 men and 3 women of the selected age group (27-28 years old) were used. It covers four exercises, Isometric scapular retraction, Strengthening, Prone scapular retraction, and Forward lunge. Deploying four ML models (DT, SVM, KNN, and RF) makes it inappropriate for real-time applications.
The [6] provides the system which evaluates the accuracy of Microsoft Kinect System. The tag placement on different body part doesn’t help to exercise in a natural way. The scope of the investigation is confined to the comparison of Microsoft Kinect to how precisely it can track joint movements. The system neither provides to classify the types of exercise nor real-time monitoring involved in it. It also does not provide any virtual communication link between the user and physiotherapist to communicate.
The IoT-based smart physiotherapy system investigated in [7] provides real-time monitoring, where physiotherapists send his/her feedback. No, automatic exercise evaluation capability exists and thus physiotherapist presence is necessary to assist and evaluate the exercise in real-time. Furthermore, this data may be examined and processed to discover statistical features such as abnormalities, recurring errors, and so on. The [11] provides the Kinect-based physiotherapy system to execute the prescribed exercise at home. It does not provide any real-time feedback from the system about prescribed exercise. It does not use any machine learning tool to automate the system and hence evaluation of patient exercise is not performed in an automatic manner and hence requires physiotherapist presence for assisting and evaluation. The patient feels uncertainty due to sensors attached to patient body using tags.
The IoT-based Smart Walker Physical Rehabilitation System provided by [18] monitors the patient’s movement during rehabilitation sessions and the physiotherapist sends his/her feedback. No automatics exercise evaluation capability exists and thus the physiotherapist’s presence is necessary to assist and evaluate the exercise in real-time. Every patient cannot purchase a smart walker and cannot afford expenses of regular physiotherapist services. The specifically designed walker serves as an obstacle in natural movements and makes the patient uncomfortable. Furthermore, this data may be examined and processed to discover statistical features such as abnormalities, recurring errors, and so on.
DiagnoConn (the Mobile Application for Robotic Rehabilitation) presented by [15] does not provide real time monitoring to be supervised by physiotherapists remotely and subsequently a lack of real time communication/feedback between patient and physiotherapist. The subject’ participants move his/her body parts according to the movement of robotics if any issue creates in system, then it can create more problems for the patients. It includes four types of exercises: passive, isometric, isotonic, and resistive. It does not use any machine learning tool to automate the system and hence no automatic evaluation of patient exercise is performed. Further, the system is costly and probably not beneficial to all patients.
Like [18], The system designed by [21] does not provide smart monitoring and there is no real time communication/feedback between patient and physiotherapist.
The system presented in [19] requires presence of the physiotherapist to assist and evaluate the exercise in real time. This system also does not provide two-way communication between the physiotherapist and the patient; only physiotherapist can monitor the patient and comments on exercises. Sensors attached to the body also make the patient uncomfortable and serve as an obstacle in natural movements. It monitors only 5 exercises and experiments done on 2 persons. The patient exercise is compared with golden standards which show from 10 repetitions’ count and 9 are correctly predicted. Also, a machine learning algorithm can be introduced to evaluate the exercise types and assists the patients to a possible extent. This leads to lessening the physiotherapist intervention for minor assistance and subsequently the physiotherapist will be available to more serious patients.
The Patient Telerehabilitation system (PTS) presented in [16] does not provide real time monitoring to be supervised by physiotherapists remotely and subsequently. Only physiotherapist can monitor the patient data from cloud and audio video connection is also established. Real time monitoring is not done and not uses any Machine learning tool to automate the system. Because machine learning algorithm are not used there is not any prediction of system and no evaluation of patient exercise performed automatically. Patient feels uncertainty due to sensors attached to patient body using tags. It provides costly setup which all patients cannot bear. In this research proposed system cannot automatically work.
m-Therapy, a multisensory framework that is presented by [14] does not provide real time monitoring to be supervised by physiotherapist remotely and subsequently. Internet connectivity is required to performed exercise sessions. It does not use any machine learning tool to automate the system. Further, the system is costly and probably not beneficial to all patients.
In [17], a system to evaluate rehabilitation based on swimming is proposed. The wearable inertial sensor devices are used in this study to monitor and evaluate the key parameters of rehabilitation activities. The system tracks the swimming movements and uploads on cloud. The physiotherapist then monitors the movement and guides the patient accordingly thus physiotherapist’s presence is necessary all the time to monitor patient exercise in real time. User Interface and Professional Interface are designed to login into system. No automatic monitoring of swimming exercises is performed, and there is no two-way communication channel between the patient and physiotherapist in real time.
VR games along with different wearable sensors by [20, 22-25] were used to develop a smart physiotherapy assistance system. In [20, 23], the author developed a glove for arm rehabilitation. In [20], the author does not describe the sensors used in the system. Both of these systems can be used only for upper limb rehabilitation. System developed by [19] used two healthy volunteers to assess the system. Testing of the system in [20] is not presented in the paper. A low-cost exoskeleton linked to VR system is presented by [24]. The results of the physiotherapy session are stored on cloud which can be further used by physiotherapist to modify the exercises accordingly. The result of assessment of system shows that exercises were difficult even for a healthy person.
Kinect interface with VR games was used to aid physiotherapy sessions at home by [22]. Only hand rehabilitation is focused in [22] and system was evaluated by thirty-three healthy volunteers. [12] used FMCW microwave radar and Flexiforce sensor. Two people assessed the system by doing multiple exercises. There is no monitoring and modifying system for exercise for physiotherapist according to the results of the physiotherapy sessions. A smart wheelchair coupled with pulleys to therapy lower and upper limbs was presented by [13]. A mobile application can be used to control the wheelchair along with speech commands. The device proposed by [13] cannot carry more than 93 kg of weight and pulley cannot manage weight of more than 10 Kg.
The systems presented by[12, 13, 20, 22-24] do not use and ML algorithm and there is a lack of two-way communication between the physiotherapist and the patient except [24]. These systems are not beneficial for all because they can only be used for the rehabilitation of specific body part. [25] presented VirtualPT measures body temperature and other vital signs during physiotherapy session. ML models were trained that automates the system. The system is costly and not beneficial for all patients. System is evaluated only on older patients.
The following table summarizes the reviewed investigations and presents a comparison among the investigations.
Table 1: Comparison Table
Reference | Technologies used | Machine Learning Models | Pros | Cons |
[2] | Electromyography sensor and inertial sensor unit (Accelerometer, Gyroscope and Magnetometer Sensor). Computer System and Module coding | DT, KNN, SVM and RF | Forwarding step to Automatically Monitor the exercise | Size of dataset is very small |
[6] | Microsoft kinect skeleton system, Vicon Bonita system and 8 infrared cameras | No Machine Learning Model used | Evaluate the accuracy of Microsoft Kinect skeleton system by using 8 IR Cameras | Only evaluate the accuracy of skeleton system no benefit to patient. Large set up and software required. |
[7] | Inertial Measurement Unit (IMU), Textile Sensor, accelerometer, gyroscope, and magnetometer, Cloud System , Rehabilitation Hub, Computer system, Wireless (Bluetooth 4.0), Internet and ePhysio Module | No Machine Learning Model used | Provide three use cases (Outdoor and indoor group therapy, or single user) Create virtual link | A complete system required to monitor exercise, Unidirectional communication channel. |
[11] | Microsoft Kinect skeleton system, Two Infrared Depth Sensors (IDS), Acceleration Sensor, RGB camera and Tablet | No Machine Learning Model used | Track the patient movements and reflect the motions on the tablet screen | Two IR Sensors and Camera required |
[12] | Fexiforce sensor and the FMCW 24GHz microwave radar | No Machine Learning Model was used | System is used for lower limb rehabilitation. | No automatically monitor patient exercise, no two-way communication channel b/w patient, System can be used only for lower limb rehabilitation |
[13] | Arduino interfaced joystick to create a smart wheelchair | No Machine Learning Model was used | Smart wheelchair with lower and upper limb rehabilitation. | No automatically monitor patient exercise, no two-way communication channel b/w patient System can be used only for lower and upper limb rehabilitation, can only lift weight up to 93 Kg |
[15] | Medical dynamometer, Range of motion encoder, force sensor, torque sensor, Encoder Input board, SQL database, Main Controller (Computer system), Internet, DiagnoConn a doctor and patient Module, Professional Interface and User Interface | No Machine Learning Model was used | Automatic remote treatment of patient. User interface and professional interface created to do and monitor exercise. Good step to automate and recover physical disorders | Work on four exercises, each patient body parts have different movement style, it can create more issues for some patients. More movement can apply from patient capacity, system programmed on standard movements not train on each subject, Internet connection required to send data. |
[16] | Camera, microphone, Drawing Tool, motion sensors, User Interface (Client and Doctor) and Patient Telerehabilitation system | No Machine Learning Model was used | Good step to automate the system, Real time feedback to patient through Audio, Video Channel and Messaging, Online Checkup of patients, patient no need to visit clinic | No automatically monitor patient exercise, Test the system only on 15 elderly people, Inter Connection required, |
[17] | A redundant 6-DoF IMU sensor that includes 3-D gyroscope and accelerometer | No Machine Learning Model was used | Track the Swimming movements and upload on cloud to monitor by physiotherapist and guide to patient about his session | No automatically monitor swimming exercise, |
[19] | Environmental sensor, Bio Signal Sensor, 3 wearable Inertial Measurement Unit (IMU), dominating ankle and wrist, with the y-axis of the sensors | No Machine Learning Model was used | Collected data can be used in future for further prediction, Check the accuracy of system by golden standards, use 10 Hz carrier frequencies, | No automatically monitor patient exercise, Test the system on 2 men and 5 exercises, |
[20] | Not Presented in paper | No Machine Learning Model was used | Developed a glove for arm rehabilitation, VR games were used for physiotherapy session, physiotherapist can view the results of the exercise session, | No automatically monitor patient exercise, no two-way communication channel b/w patient, no information about sensors used, only for arm rehabilitation |
[21] | Inertial Measurement Unit (IMU), Pressure Sensor, Force Sensor, wireless communication (Blue tooth) | MLP, LibSVM, SMO, J48, RF, NB, LR and C4.5 RT | Good step to automate the system, Audio, and video feedback to patient | Lake of in written communication, Not automatic working, A large list of ML Models used , Test only on five exercises, Internet connection required to send data , Physiotherapist required to monitor the patient exercise |
[22] | Kinect natural user interface and a set of Unity3D VR games. | No Machine Learning Model was used | Kinect interface was used along with VR games for rehabilitation. Thirty-three healthy subjects assessed the system, Therapist can view the results of the session using a mobile application. | No automatically monitor patient exercise, No two-way communication channel b/w patient. System can be used only for lower limb rehabilitation |
[23] | FlexiForce A201, Gyroscope, accelerometer, and magnetometer | No Machine Learning Model was used | Developed a glove for arm rehabilitation, VR games were used for physiotherapy session, System was tested by grabbing different subjects in VR games by healthy subjects, | No automatically monitor patient exercise, No two-way communication channel b/w patient, only for arm rehabilitation |
[24] | Exoskeleton sensor | No Machine Learning Model was used | Exoskeleton linked with VR games is used for elbow rehabilitation, Therapist can view results and modify the exercise. | No automatically monitor patient exercise and exercises were difficult even for healthy persons, only for elbow rehabilitation |
[25] | Kinect sensor, MAX30100 Pulse Oximeter sensor and temperature sensor | KNN, CNN and DT | VirtualPT that measures body temperature and other vital signs during physiotherapy session. ML models were trained that automates the system. The system is costly and not beneficial for all patients | System is costly and only assessed over older patients. |
4. Conclusion
In recent years, there has been an increased need for effective healthcare systems in response to the world’s ageing population, the rise in the incidence of chronic diseases, and the proliferation of new medical technologies. Some persons are unable to move and function normally due to a physical abnormality, most of which are the result of accident, illness, or old age. Numerous methods have been developed by researchers to help and remotely monitor these individuals. This study reviewed the strategies adopted by numerous scholars, together with the analysis and application of technology, to take on these crucial issues. The purpose is to provide a concise summary of current approaches and tools to aid future researchers in their pursuit of a global solution. The rapid development of compactness and robustness of processors, sensors, and coupling with machine learning has increased the potential of smart and single global solutions conceivable for future researchers to address issues related to remote physiotherapy assistance systems.
Conflict of Interest
The authors declare no conflict of interest.
- L. J. Ramírez López, A. Rodriguez Garcia, and G. Puerta Aponte, “Internet of things in healthcare monitoring to enhance acquisition performance of respiratory disorder sensors,” International Journal of Distributed Sensor Networks, vol. 15, no. 5, p. 1550147719847127, 2019, doi: https://doi.org/10.1177/1550147719847127.
- A. Pereira, D. Folgado, R. Cotrim, and I. Sousa, “Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors,” 2019, pp. 73-82, doi: 10.5220/0007391300730082.
- C. Stergiou, K. E. Psannis, B.-G. Kim, and B. Gupta, “Secure integration of IoT and cloud computing,” Future Generation Computer Systems, vol. 78, pp. 964-975, 2018, doi: doi.org/10.1016/j.future.2016.11.031.
- M. A. Al-Garadi, A. Mohamed, A. K. Al-Ali, X. Du, I. Ali, and M. Guizani, “A survey of machine and deep learning methods for internet of things (IoT) security,” IEEE Communications Surveys & Tutorials, vol. 22, no. 3, pp. 1646-1685, 2020, doi: 10.1109/COMST.2020.2988293.
- I. Lee and K. Lee, “The Internet of Things (IoT): Applications, investments, and challenges for enterprises,” Business Horizons, vol. 58, no. 4, pp. 431-440, 2015, doi: 10.1016/j.bushor.2015.03.008.
- S. Phommahavong, D. Haas, J. Yu, S. Krüger-Ziolek, K. Möller, and J. Kretschmer, “Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy,” Current Directions in Biomedical Engineering, vol. 1, no. 1, pp. 184-187, 2015, doi: 10.1515/cdbme-2015-0046.
- C. Vallati, A. Virdis, M. Gesi, N. Carbonaro, and A. Tognetti, “ePhysio: a wearables-enabled platform for the remote management of musculoskeletal diseases,” Sensors, vol. 19, no. 1, p. 2, 2019, doi: 10.3390/s19010002.
- W. Wei, Y. Lu, E. Rhoden, and S. Dey, “User performance evaluation and real-time guidance in cloud-based physical therapy monitoring and guidance system,” Multimedia Tools and Applications, vol. 78, no. 7, pp. 9051-9081, 2019, doi: 10.1007/s11042-017-5278-5.
- S. F. Bassett, “The assessment of patient adherence to physiotherapy rehabilitation,” New Zealand journal of physiotherapy, vol. 31, no. 2, pp. 60-66, 2003.
- J. Smith, J. Lewis, and D. Prichard, “Physiotherapy exercise programs: are instructional exercise sheets effective?,” Physiotherapy theory and practice, vol. 21, no. 2, pp. 93-102, 2005, doi: 10.1258/jtt.2009.0810.
- D. Haas, S. Phommahavong, J. Yu, S. Krüger-Ziolek, K. Möller, and J. Kretschmer, “Kinect based physiotherapy system for home use,” Current Directions in Biomedical Engineering, vol. 1, no. 1, pp. 180-183, 2015, doi: 10.1515/cdbme-2015-0045.
- O. Postolache and P. S. Girão, “Physiotherapy smart connected devices for S-health,” 2016: IEEE, pp. 1-6, doi: 10.21307/ijssis-2019-131.
- M. M. Rahman, S. Chakraborty, A. Paul, A. M. Jobayer, and M. A. Hossain, “Wheel therapy chair: A smart system for disabled person with therapy facility,” 2017: IEEE, pp. 630-635, doi: 10.1109/ICSCAN53069.2021.9526427.
- M. A. Rahman and M. S. Hossain, “m-Therapy: A multisensor framework for in-home therapy management: A social therapy of things perspective,” IEEE Internet of Things Journal, vol. 5, no. 4, pp. 2548-2556, 2017, doi: 10.1109/JIOT.2017.2776150.
- M. E. Aktan and E. Akdoğan, “Design and development of a mobile application for a robotic rehabilitation process: Diagnoconn,” 2017: IEEE, pp. 1-5. doi: 10.3906/elk-2007-24
- M. Caporuscio, D. Weyns, J. Andersson, C. Axelsson, and G. Petersson, “Iot-enabled physical telerehabilitation platform,” 2017: IEEE, pp. 112-119, doi: 10.1109/ICSAW.2017.43.
- A. Kos and A. Umek, “Wearable sensor devices for prevention and rehabilitation in healthcare: Swimming exercise with real-time therapist feedback,” IEEE internet of things journal, vol. 6, no. 2, pp. 1331-1341, 2018, doi: 10.1109/JIOT.2018.2850664.
- C. Nave and O. Postolache, “Smart walker based IoT physical rehabilitation system,” 2018: IEEE, pp. 1-6, doi: 10.1109/ISSI.2018.8538210.
- A. Candelieri, W. Zhang, E. Messina, and F. Archetti, “Automated rehabilitation exercises assessment in wearable sensor data streams,” 2018: IEEE, pp. 5302-5304, doi: 10.1109/BigData.2018.8621958.
- R. Alexandre and O. Postolache, “Wearable and IoT technologies application for physical rehabilitation,” 2018: IEEE, pp. 1-6, doi: 10.1109/ISSI.2018.8538058.
- I. Bisio, C. Garibotto, F. Lavagetto, and A. Sciarrone, “When eHealth meets IoT: A smart wireless system for post-stroke home rehabilitation,” IEEE Wireless Communications, vol. 26, no. 6, pp. 24-29, 2019, doi: 10.1109/MWC.001.1900125.
- O. Postolache et al., “Tailored virtual reality for smart physiotherapy,” 2019: IEEE, pp. 1-6, doi: 10.1109/ATEE.2019.8724903.
- O. Postolache, D. J. Hemanth, R. Alexandre, D. Gupta, O. Geman, and A. Khanna, “Remote monitoring of physical rehabilitation of stroke patients using IoT and virtual reality,” IEEE Journal on Selected Areas in Communications, vol. 39, no. 2, pp. 562-573, 2020, doi: 10.1109/JSAC.2020.3020600.
- D. H. de la Iglesia, A. S. Mendes, G. V. González, D. M. Jiménez-Bravo, and J. F. de Paz Santana, “Connected elbow exoskeleton system for rehabilitation training based on virtual reality and context-aware,” Sensors, vol. 20, no. 3, p. 858, 2020, doi: doi.org/10.3390/s20030858.
- T. A. Heiyanthuduwa, K. W. N. U. Amarapala, K. D. V. B. Gunathilaka, K. S. Ravindu, J. Wickramarathne, and D. Kasthurirathna, “VirtualPT: Virtual reality based home care physiotherapy rehabilitation for elderly,” 2020, vol. 1: IEEE, pp. 311-316, doi: 10.1109/ICAC51239.2020.9357281.