Harnessing the Power of Machine Learning and Sensor Detection in a Simulation for the Design of Smart Date Harvesting Robot

(This article belongs to the Section Automation and Control Systems (ACS))
Export Citations
Cite
Adlan, H. H. A. , Zamanan, R. A. , Almufleh, L. , Almuqrin, T. and Alhassoun, J. (2026). Harnessing the Power of Machine Learning and Sensor Detection in a Simulation for the Design of Smart Date Harvesting Robot. Journal of Engineering Research and Sciences, 5(2), 1–8. https://doi.org/10.55708/js0502001
Hanan Hassan Ali Adlan, Reham Al Zamanan, Leen Almufleh, Tala Almuqrin and Jory Alhassoun. "Harnessing the Power of Machine Learning and Sensor Detection in a Simulation for the Design of Smart Date Harvesting Robot." Journal of Engineering Research and Sciences 5, no. 2 (February 2026): 1–8. https://doi.org/10.55708/js0502001
H.H.A. Adlan, R.A. Zamanan, L. Almufleh, T. Almuqrin and J. Alhassoun, "Harnessing the Power of Machine Learning and Sensor Detection in a Simulation for the Design of Smart Date Harvesting Robot," Journal of Engineering Research and Sciences, vol. 5, no. 2, pp. 1–8, Feb. 2026, doi: 10.55708/js0502001.
The Traditional date harvesting is labor-intensive and inefficient, leading to losses and quality issues. This paper introduces an AI-powered robotic system that automates date harvesting using computer vision, LiDAR sensors, and a robotic arm with a suction mechanism. The robot is capable of perception, it detects, classifies, and harvests ripe dates autonomously, ensuring minimal damage and improved efficiency. The work develops a CNN architecture and a YOLO model. Propose using sensors for detection purposes. By integrating YOLO for object detection and CNN for maturity classification, the system optimizes harvesting decisions. This solution is simulated and is supposed to enhance productivity, reduces costs, and improves date quality, contributing to empowering the agriculture sector with powerful tool that encourage date planting, nourish life through economic investment in dates, provide advancement in agricultural automation, and contributing to sustain date planting.
1. Introduction
The Kingdom of Saudi Arabia is distinguished in the production and export of dates; it ranked second as one of the largest countries in the world producing dates [1]. Dates are an essential part of Saudi culture and are considered a strategic national product and one of the most important food and economic sources [2].
Manual harvesting is the prevailing method used, it requires physical strength to climb and high endurance to work under the sun. This traditional method currently practiced in the field of date harvesting influences the date production cycle negatively. Results in wasted dates and time.
Automated harvesting is considered essential in the field of date harvesting. The transition from traditional harvesting to automated harvesting provides ease and speed in harvesting fruits and provides a fundamental solution to the problem of delayed harvesting that affects the date market [3, 4, 5]. In the traditional date harvesting process, farmers face major obstacles that lead to huge losses, such as high costs resulting from relying on many workers, in addition to the risks that threaten the safety of workers due to working at high heights under the sun, and waste resulting from human errors during harvesting or transporting dates [6]. Automatic harvesting using advanced algorithms and artificial intelligence proof effectiveness and efficiency. Computer vision. Such as YOLO (You Only Look Once) for real-time object detection [7, 8]. Convolutional neural network (CNN) algorithm, used to identify maturity of dates and their readiness for harvest [9, 10, 11]. LiDAR technology is found to be efficient in determining dimensions and distances of harvest sites. Supported by a computer vision unit for image analysis, improves accuracy of date recognition and harvest location determination [11, 12]. Vision systems based on CNN was found to be efficient, where it reached 99.1% recognition rate [13]. Robots are efficient in harvesting; many were developed for different fruits. Tomato [14], cucumber [15], strawberry [16], and palm oil [17], to name a few.
2. Leena Robot
Harvesting robots can be utilized to collect, process and analyses individual spatiotemporal data for targeted date type ripening time, harvest time, date status, date defects in addition to environmental information related to farms and palm trees. These contribute to harvesting the largest possible amount of healthy dates free of damage. The presence of robots in the harvesting field is vital and encourage investment in this field. In this paper a proposed robot for harvesting dates is suggested.
The main parts of the date harvesting robot include Sensory system consisting of vision system, distance sensors, temperature and humidity Unit, and robotic arms for sucking the dates. Data processing and decision-making systems are applied to harvest dates with the inclusion of artificial intelligence algorithms.
Leena is a robot using arm with tube for sucking dates. Incorporating Camera and sensors that enable capture dates images to determine maturity of the date for harvest. Other functionalities include moving around and locating the palm. The robot is designed with the aim, Towards efficient Date Harvesting. The design objectives are to reduce the labor intensity, cost, and inefficiency of manual harvesting. The robot is designed and implemented on simulation. The field environment with palms is created, and the robot move around, locate the palm, detect the dates, classify its maturity level, then harvest the dates. The scope of the project is limited to the harvesting of the dates. Other functionalities of implementing the storage unit is beyond the scope of the current implementation. The design of the robot incorporates the following functional requirements:
- Develop a database of date bunch types and weights at different maturity levels to support automation in the date palm application.
- Move around the date farm to locate palm trees.
- Detect the presence of dates and distinguish the dates from other elements in scenes (e.g trunk, leaves, ground, and sky).
- Capture images of dates to determine the maturity of the fruits.
- Determine the maturityof the dates for decision making.
3. Methodology
Leena robot integrates hardware and software. Design of the hardware was performed on a simulation environment. Hypothetical hardware mechanics is proposed to enable the functional requirement and are simulated on webots (webots simulator is an open source, cross-platform robotics simulation environment) and Blender for Palm trees.
LiDAR technology enables accurately determine dimensions and distances of the harvest sites. The principle of its operation is through a pulsed laser to calculate the variable distances of an object from the ground surface. It measures the time it takes to return after bouncing off a surface. These light pulses, together with the information collected, generate accurate three-dimensional details on the ground surface and the target object. Supported by a computer vision unit for image analysis, improves the accuracy of date recognition and harvest location determination.
The Software component develops the system make use of YOLO (You Only Look Once). Yolov8 is one of the Yolo model series, is an AI model used to detect, classify, and track objects within images or videos it is used to distinguish dates from the stem and other unimportant parts in the image. After Yolov8 locates dates in the images, it sends them to a CNN module to classify the dates into mature and immature.
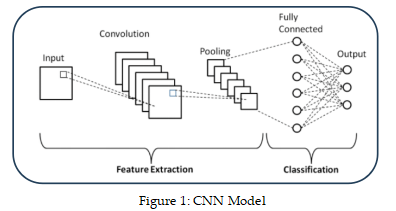
Convolution Neural Networks (CNN) is a class of neural networks designed for data processing and is particularly suitable for image recognition and processing tasks [18]. It is integrated in the system as part of the computer vision system, where it undertook the task of processing the data set and classifying it into ripe Barhi dates (which are pickable) and unripe Barhi dates (which are not pickable).
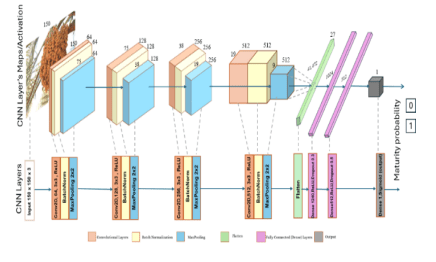
Figure 1 depicts the main components of a general CNN model. It consists of convolutional layers, pooling layers, and fully connected layers. It proved success in identifying the maturity of dates and their readiness for harvest.
4. System Architecture and the Robot Structure
The architectural components of the robot system are given Figure 2.
Figure 2 shows the architecture of the date harvesting robot. It illustrates the main components of the robot as follows:
Control Panel: Provides the user interface that enable operating and control of the robot. The administrator (farmer) can send commands such as starting the robot, starting the harvesting process, or unloading the dates from the warehouse. This is connected to the control unit.
Control Unit: The central node of the system, manages coordination between the various components. It receives commands from the control panel and distributes instructions to the other components. It is connected to the mobility unit. If the farmer initiates the harvesting process from the control panel, the control unit will send a signal to the motion unit to begin its work.
Mobility Unit: This unit is responsible for the robot’s movement within the farm and among the palm trees. It receives commands from the control unit to initiate its movement. It contains sensors to suit working in challenging agricultural environments.
The robotic arm: This is the component for reach for the date. It uses special camera to locate the date and capture images for processing to if the date is confirmed to be ripe. This process is controlled by the control unit. The control unit transmits the date’s ripeness status to the hand. Based on the ripeness status, the hand picks the date.
The camera: Capture images of the dates for processing their ripeness percentage. It is mounted in the robot’s hand and takes pictures of the dates on the trees. These images are sent to the integrated artificial intelligence module to analyze the degree of ripeness and classify the date into ripe or unripe.
The storage unit: This is the unit where the picked dates are stored until they are unloaded. It is connected to a display panel that displays the storage unit’s status (full or empty), along with other storage status details.
The architectural components communicate via internal links, ensuring real-time and accurate information exchange and achieving synchronization of operations.
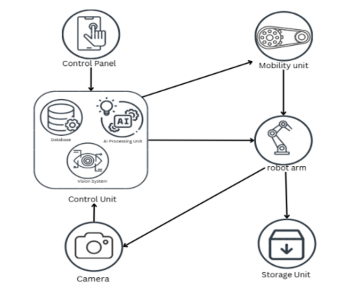
Figure 3 shows hypothetical mechanical parts of the robot, which play pivotal roles in performing the required tasks
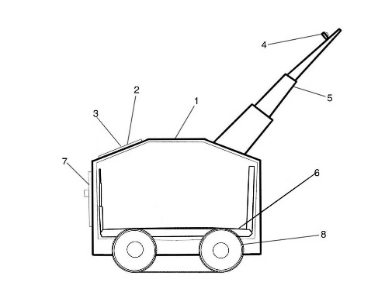
In Figure 3 the numbers indicate the following functionalities:
- Basic structure: The structure on which the robot design is based, as it supports all components and allows them to be fixed firmly and effectively.
- Control screen: The control screen allows the worker to monitor and control the robot, and allows changing the language to facilitate control of the robot by different users.
- Start button on screen: Operates the robot and prepare it to be ready for the harvesting process.
- Camera: To identify dates and determine whether the date is ripe or not to harvest.
- Robotic arm: This arm is a tube with attached camera used to move to capture date images and suck the ripe date and pass it to the storage box.
- Storage box: The storage box is carefully designed storage unit, used to protect the dates during the harvesting process. It is made of spongy surface that provides protection for the dates so that they do not deform during the fall, and helps maintain their quality.
- Unloading dates door: A back door used to unload the storage box to get the harvested dates, this door open automatically allowing the surface to descend to drop the dates into a container.
- Tracked wheels: Crawler wheels used to enable the robot to move, allowing it to walk on rough surfaces, aims to enhance ability to navigate farms and uneven lands.
5. Implementation and Results
The robot is developed on webots simulator. Initial prototypes is displayed in Figures 4 and Figure 5 respectively.

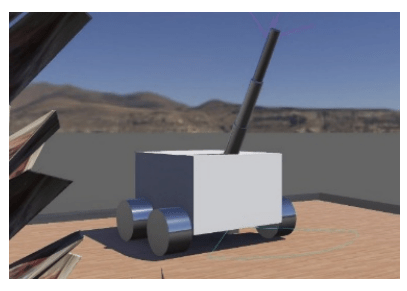
Figures 4 and 5 shows part of the robot structure. The structure was designed using a rectangular box (1 m long, 0.9 m wide, and 0.6 m high) to ensure even weight distribution and stability during movement, as it serves as the foundation upon which the rest of the components are mounted. The structure was painted gray (0.8, 0.8, 0.8) to reflect the robot’s practical, industrial appearance. Wheels Were constructed from cylinders (with a radius of 0.18 m and a height of 0.2 m). This shape was chosen to suit the agricultural environment and ensure stable movement that could support the main structure and enable movement on uneven terrain. A hinge joint was used to connect them to the main structure, enabling them to operate in a limited circular motion. The arm is designed with three moving cylinder-shaped layers, using a slider joint that allows movement for each layer. Each layer is controlled by a motor, providing precise linear movement and easy length control. It can be extended to reach remote locations. The first layer, arm1, is located closest to the palm tree and is equipped with a camera. The second layer, arm2, is in the middle. The third layer, arm3, provides precise movement and extends to reach target locations. A camera is mounted on the top of Arm1 and is designed to capture live images of the surrounding scene. To determine the location and ripeness of the dates, the camera captures the dates and sends the data to the image processing algorithms to identify the dates and determine whether they are ready to be picked.
A simulated Lidar sensor, mounted at the bottom of the robot on the front, is used to obtain three-dimensional depth information in the surrounding environment. It measures distances in meters based on OpenGL rendering. It is used to provide accurate distance information in the surrounding environment and helps the robot avoid obstacles. It is an ideal tool for agricultural harvesting robots to accurately locate trees and obstacles.
The control unit of the robot system is responsible for task allocation and execution. The main part that control and enables functioning and automation of the harvesting process. The main modules of the control unit consist of Vision module, that implements the CNN module for classifying the date. Yolo model is used to distinguish dates from the stem and other unimportant parts in the image. Yolo-v8 locates dates in the images then passed them to CNN for classifying mature and immature dates.
The data set used for training the YOLO is developed by labelling images extracted from original data set. The dataset contains 5 date varieties, Naboot Saif; Khalas; Barhi; Menei; and Sullaj. Data Labelling and YOLO Processing performed by training the YOLO model on labeled datasets. The labelling was carried into two stages. first labelling of 100 models manually. The manually trained models are used to train a mini model automatically. The process was iterated every 100 images. The final labelled dataset results in 8875. The labeling adopted a confidence level of 60%, the extent to which the model is certain that the detected object belongs to a specific category. Increasing the confidence level increases the precision level due to reducing the number of false detections. a 70% overlap level was then adopted, the extent of overlap of the bounding boxes drawn around objects. The data was divided into 70% for training, 20% validate, and 10% test. The first preparation of the data utilized Roboflow. Roboflow used to manage deep learning processes, allowing easily upload, organize, and process massive datasets. It has been used to label date clusters to distinguish them from palm trees.
Figure 6 illustrates the labelling process. The tagged dataset is utilized for further processing. The labelling process produced 8875 images. 70% of the labelled images used for training, 20% for validation, and 10% for testing. Yolo trained on these images to detects dates as mentioned previously Figures 7.

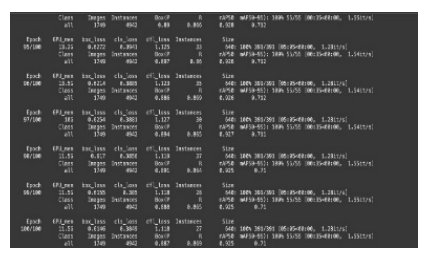
Figure 7 shows part of the training process, and the progress of the training as 100 epochs expired for the Yolo module. Table 1 displays one of the of training results, as it approaches 88.8%.
Table 1: The output percentages of the training
| Metric | Score (%) |
|---|---|
| Precision | 88.89% |
| Recall | 84.68% |
| mAP@50 | 91.72% |
| mAP@50:95 | 70.75% |
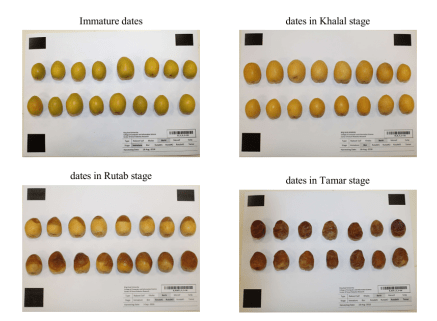
The dataset abstracted to a single type, the Barhi date and the harvesting process was limited to the last three stages of the muter of the Barhi date named Khalal, Rutab, and Tamar stages.
Figure 8 displays examples of maturity stages of Bahri dates. Developing the CNN based on utilizing the tagged images. The Dataset reorganized into two main categories, for training and testing. The dataset consists of Barhi images. Training data set contains mature and ripe dates with 1,066 images ( Khalal stage , Rutab stage , and Tamar stage). Immature and unripe dates with 738 images contain the first stage of Barhi dates (Immature dates). The second category of the testing data contains mature and ripe dates with 427 image contains of mature Bahri date ( Khalal stage , Rutab stage , and Tamar stage), and immature and unripe dates with 344 image contains the first stage of barhi dates.
The convolution neural network architecture is developed. Figure 9 details the layers of the CNN architecture used to classify the maturity of dates based on the input images. The architecture consists of several Convolutional layers, followed by pooling layers of Max Pooling, then Flattened, converted the value to Dense connected layers, for a Sigmoid activation output layer. CNN architecture developed to enable the robot to determine the maturity of the date. The CNN receives a color image of 150x150x3. Three convolution blocks are applied with increasing filter sizes. The first layer used 64 filters, each of 3×3 kernels. The second layer used 128 filters, each of size 3×3 kernel. The third convolution layer is 256 filters with 3×3 kernels. The fourth convolution layer is 512 filters with 3×3 kernels. Each of the previous used ReLU (Rectified Linear Unit). The flatten layer is composed of 1034 neurons and a sigmoid activation.
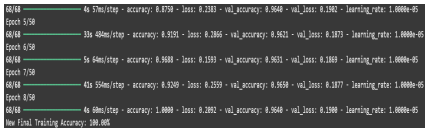
Portion of the extensive training of the CNN model is captured as in Figure 10. 100% recognition was achieved. Testing the model produced 96.23%.
Further model investigation on accuracy through validation of the model is depicted in Figure 11.
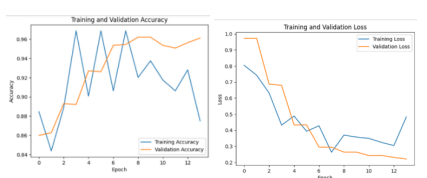
Figure 11 shows the Accuracy Curves and Loss Curves. These graphs show the evolution of the model’s performance during the training process by tracking the training accuracy and validation accuracy. Training accuracy shows a positive trend as epochs reached 8, then it started to decline. Where the validation shows continuous positive trend. The loss curve harmonizes with the accuracy as it reflects the training behavior and the validation as well.
5.1. Environment
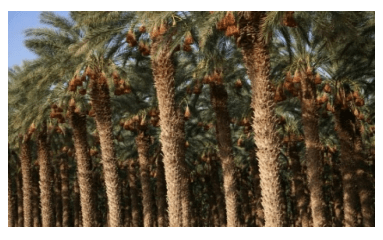
The term environment refers to the palm farm where the robot will operate. Palm farms are considered a unique agricultural environment, characterized by specific distribution of trees and limited spaces available for robot movement, Figure 12.
The environment is simulated.by creating a simulated palm farm environment. The palm trees were designed in Blender and imported into Webots to achieve a more realistic representation. The goal of this simulation is to provide an accurate virtual environment to test the robot’s movement and evaluate its performance in a setting that closely resembles real-world agricultural conditions Figure 13.

To create the simulated palm farm environment in Webots, a 60×60 meter terrain designed to allow placing 35 palm trees in organized rows with equal spacing of approximately 2 meters between each tree. The palm tree model was originally a pre-made asset, which is then converted to a compatible format and imported into Blender, Figure 14.
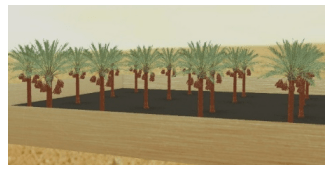
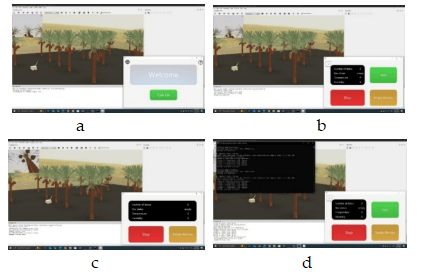
Figure 15 shows a simulated palm environment with date trees organized to resemble a real date farm. The integrated system, with the robot touring around the farm is shown in Figure 16. Portions of the control panel displays are attached with the corresponding robot movement.

Figure 16 shows movement of the robot in the date farm. In a, the robot was operated to locate the tree, it moves around and when detected a palm it stopped to capture images for the yolo module. When date are detected the images are passed to the CNN to determine the maturity level and the system decide on the harvesting.
6. Conclusions and Recommendations for Future Work
Currently the field of date harvesting lacks automated robots and harvesting mechanisms. The Date harvesting robot was designed and implemented in simulation environment for cost effective experiments. This motivates the production of a real robot. The field environment with palms was created and simulated to monitor the robot implementation on a real scenario.
Recommendations that develop the current model can be summarized in training a CNN model on several date varieties. The YOLO’s performance can revisited by creating a new database preferably containing more images of palm trees and dates. Implementing the system on a real robot devised by the simulation to test actual performance in a real palm tree environment.
- Ministry of Environment Agriculture and Water Report, Accessed: Nov. 27, 2024. [Online]. Available: https://www.mewa.gov.sa/ar/MediaCenter/News/Pages/News6742020.aspx.
- Ministry of Environment, Agriculture, and Water Report Accessed: Nov. 27, 2024. [Online]. Available: https://www.mewa.gov.sa/ar/MediaCenter/News/Pages/News4732020.aspx
- National Center for Date, Accessed: Nov. 27, 2024. [Online]. Available: https://old.ncpd.gov.sa/services/page/farm1/palm-care-guide
- M. Samir El-Habbab and A. M. El-Saad, “Assessment of Post-Harvest Loss and Waste for Date Palms in the Kingdom of Saudi Arabia,” 2017.
- M. Abounajmi, “Mechanization of dates fruit harvesting,” in ASAE Annual International Meeting 2004, 2004, pp. 171–178. doi: 10.13031/2013.16131.
- H. Altaheri, M. Alsulaiman, G. Muhammad, S. U. Amin, M. Bencherif, and M. Mekhtiche, “Date fruit dataset for intelligent harvesting,” Data Brief, vol. 26, Oct. 2019, doi: 10.1016/j.dib.2019.104514.
- Mahmoud Yousif “Know the Biggest 10 Date Production in the World, Accessed: Nov. 27, 2024. [Online]. Available: https://www.aljazeera.net/ebusiness/2024/3/21.
- Zoumana KEITA, “YOLO Object Detection Explained”, data camp. Accessed: Nov. 27, 2024. [Online]. Available: https://www.datacamp.com/blog/yolo-object-detection-explained
- J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real-Time Object Detection”, [Online]. Available: http://pjreddie.com/yolo/
- “Introduction to Convolution Neural Network”, geeksforgeeks. Accessed: Nov. 27, 2024. [Online]. Available: https://www.geeksforgeeks.org/introduction-convolution-neural-network/
- K. Schmid et al., “Lidar 101: An Introduction to Lidar Technology, Data, and Applications,” 2012. [Online]. Available: www.csc.noaa.gov
- Bhupendra Sharma, “What is LiDAR technology and how does it work?,” geospatial world. Accessed: Nov. 27, 2024. [Online]. Available: https://geospatialworld.net/prime/technology-and-innovation/what-is-lidar-technology-and-how-does-it-work/
- Hamdi Taher Altaheri, Mansour Alsulaiman Ghulam Muhammad, “A VISION SYSTEM FOR DATE HARVESTING ROBOT,” 2019. [Online]. Available: https://sites.google.com/view/daterobotic
- L. L. Wang et al., “Development of a tomato harvesting robot used in greenhouse,” International Journal of Agricultural and Biological Engineering, vol. 10, no. 4, pp. 140–149, 2017, doi: 10.25165/j.ijabe.20171004.3204.
- E. J. Van Henten et al., “An Autonomous Robot for Harvesting Cucumbers in Greenhouses,” 2002.
- Y. Xiong, Y. Ge, L. Grimstad, and P. J. From, “An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation,” J Field Robot, vol. 37, no. 2, pp. 202–224, Mar. 2020, doi: 10.1002/rob.21889.
- A. F. Japar, H. R. Ramli, N. M. H. Norsahperi, and W. Z. W. Hasan, “Oil Palm Loose Fruit Detection using YOLOv4 for an Autonomous Mobile Robot Collector,” IEEE Access, 2024, doi: 10.1109/ACCESS.2024.3446890
- IEEE DataPort, “Date Fruit Dataset for Automated Harvesting and Visual Yield Estimation,”, [Online]. Available: https://ieee-dataport.org/documents/date-fruit-dataset-automated-harvesting-and-visual-yield-estimation